| Name: | Microsoft Kinect for Windows |
| Version: | 6.7.2 |
| Available for: | Manager V7 and Manager V6 (Lite & Pro), Showmaster (Mini, ST, Pro, LE, XS & iPro) |
| Limitation In: | |
| Device Brand: | Microsoft |
| Positrack Compatible: | No |
| Resources type: | TCP/IP Network |
Overview
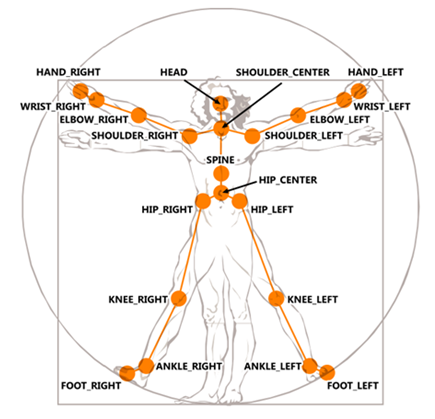
This MXM provides skeletal data from 20 joints for up to 2 persons via a Microsoft Kinect for Windows Sensor.
The sensor provides tracking information for 20 joints (Hip Center, Spine, Shoulder Center, Head, Left Shoulder, Left Elbow, Left Wrist, Left Hand, Right Shoulder, Right Elbow, Right Wrist, Right Hand, Left Hip, Left Knee, Left Ankle, Left Foot, Right Hip, Right Knee, Right Ankle, Right Foot). The data for each joint includes the X, Y and Z position values relative to the Kinect Sensor and the tracking state of the joint.
The Kinect for Windows sensor must be installed on a Windows 7 or Windows 8 machine with the Microsoft Kinect for Windows Runtime installed and the Kinect Network Remote application running. The Kinect for Xbox sensor is NOT supported.
MxM Installation
The Kinect Network Remote must be installed on the computer with the Kinect for Windows Sensor. For performance reasons it is recommended to install the Kinect for Windows Sensor on a dedicated machine. The Kinect Network Remote requires the installation of the Kinect for Windows Runtime and .NET Framework 4.
The Kinect Network Remote communicates to the MXM using TCP/IP.
Device Setup
Device creation window:

The MXM setup window allows you to specify the IP Address of the computer running the Kinect Network Remote. This can be the local computer, however for performance reasons it is strongly encouraged to run the Kinect Network Remote on a dedicated machine. The Network port can also be specified and defaults to 4532. The network port must match the setting in the Kinect Network Remote.
In order to view the skeletal data it is necessary to select which joints the MXM should track for each person (skeleton). If only one person is to be tracked you must select Skeleton 1 joints. By selecting a joint the X, Y, Z and TrackingState variables will become available.
Kinect Network Remote (Configuration)
Main Window:

The Kinect Network Remote provides an interface between the Kinect for Windows sensor running on a computer and the Medialon MXM running on a remote device over the network. The Kinect Network Remote must be running at all time for the Kinect for Windows MXM to work.
The Kinect Network Remote provides limited status information on its main screen:
- Client Count: The number of MXM clients that are connected to the Kinect Network Remote.
- Active Skeleton Count: The number of people that are currently being tracked by the Kinect for Windows Sensor; max 2.
- Kinect Status: This is the status returned from the Kinect for Windows Sensor.
The Enable Camera Preview checkbox enables the Kinect for Windows sensor’s camera for viewing locally on the Kinect Network Remote. This can be used for focusing the sensor to the proper orientation.
- IP Addresses: This is a list of all the IPv4 IP Addresses that the Kinect Network Remote is listening on.
Preferences Window:
Network port defines the network port that the Kinect Network Remote will listen to for incomming connections from the MXM. This port must match the settings in the MXM. There can be multiple instances of the MXM that can connect to a single instance of the Kinect Network Remote.
By default the position units are in inches. To enable metric units select the checkbox.
After saving the settings, the Kinect Network Remote must be closed and re-opened for the settings to take effect.
Device Commands
Start Tracking
Tells the Kinect Network Remote application to start the streaming of position information.
Stop Tracking
Tells the Kinect Network Remote application to stop the streaming of position information.
Device Variables
Status
[Enum] Current status of the device connection.
- “Unconnected”:Not connected
- “Connecting”:Connection in progress
- “Ready”:Device is connected and ready to work
- “Busy”:Device working
KinectStatus
[Enum] Current status of the Kinect for Windows device.
- “Undefined”:Device status is unavailable
- “No Kinect Available”:No Kinect Sensor could be found
- “Connected”:The Kinect for Windows Sensor is connected, and functioning properly
- “Initializing”:The Kinect for Windows Sensor is initializing
- “Error”:The Kinect for Windows Sensor has an undefined error
- “Not Powered”:The Kinect for Windows sensor is not powered. Check the external power supply
- “Application Conflict”:Another application has control over the Kinect for Windows Sensor
- “Device Not Genuine”:The Kinect Sensor is not genuine
- “Device Not Supported”:The Kinect for Xbox Sensor is not supported. Please use a Kinect for Windows Sensor
- “Insufficient USB Bandwidth”:There is insufficient USB bandwidth, please make sure the Kinect Sensor has a dedicated USB 2.0 bus
MeasurementUnits
[Enum] Provides the status of what unit of measurement the Kinect Network Remote is streaming.
- “Undefined”:Not Defined
- “Inches”:Position units are in Inches from the Kinect Sensor
- “Meters”:Position units are in Meters from the Kinect Sensor
Skeleton1_TrackingId
[Integer] Contains the ID for the first skeleton being tracked.
Note: Note that, if a user leaves the scene and comes back, it will receive a new tracking ID chosen randomly. It will not be related to the one he/she had when left the scene.
Skeleton1_HipCenter_X
[Real] Contains the value for X position of the specified joint on the specified skeleton. This is the horizontal distance from the Kinect for Windows sensor.
Note: Angle of Kinect vision 57.5 degrees; Value ranges from approximately–2.2m to +2.2m.
Skeleton1_HipCenter_Y
[Real] Contains the value for Y position of the specified joint on the specified skeleton. This is the vertical distance from the Kinect for Winows sensor.
Note: Angle of Kinect vision 43.5 degrees; Value ranges from approximately–1.6m to +1.6m.
Skeleton1_HipCenter_Z
[Real] Contains the value for Z position of the specified joint on the specified skeleton. This is the distance from the Kinect for Windows sensor to the joint.
Note: Value ranges from 0 to 4.0m; Practical limits ranges from 1.2m to 3.5m.
Skeleton1_HipCenter_TrackingState
[Enum] Current tracking status for the specified joint on the specified skeleton.
- “Not Tracked”:The joint position is not currently being tracked by the Kinect for Windows Sensor
- “Inferred”:The joint position is not currently being tracked, but is being calculated from surrounding joints
- “Tracked”:The joint position is currently being tracked by the Kinect for Windows Sensor
Skeleton1_Spine_X
[Real] Contains the value for X position of the specified joint on the specified skeleton. This is the horizontal distance from the Kinect for Windows sensor.
Note: Angle of Kinect vision 57.5 degrees; Value ranges from approximately–2.2m to +2.2m.
Skeleton1_Spine_Y
[Real] Contains the value for Y position of the specified joint on the specified skeleton. This is the vertical distance from the Kinect for Winows sensor.
Note: Angle of Kinect vision 43.5 degrees; Value ranges from approximately–1.6m to +1.6m.
Skeleton1_Spine_Z
[Real] Contains the value for Z position of the specified joint on the specified skeleton. This is the distance from the Kinect for Windows sensor to the joint.
Note: Value ranges from 0 to 4.0m; Practical limits ranges from 1.2m to 3.5m.
Skeleton1_Spine_TrackingState
[Enum] Current tracking status for the specified joint on the specified skeleton.
- “Not Tracked”:The joint position is not currently being tracked by the Kinect for Windows Sensor
- “Inferred”:The joint position is not currently being tracked, but is being calculated from surrounding joints
- “Tracked”:The joint position is currently being tracked by the Kinect for Windows Sensor
Skeleton1_ShoulderCenter_X
[Real] Contains the value for X position of the specified joint on the specified skeleton. This is the horizontal distance from the Kinect for Windows sensor.
Note: Angle of Kinect vision 57.5 degrees; Value ranges from approximately–2.2m to +2.2m.
Skeleton1_ShoulderCenter_Y
[Real] Contains the value for Y position of the specified joint on the specified skeleton. This is the vertical distance from the Kinect for Winows sensor.
Note: Angle of Kinect vision 43.5 degrees; Value ranges from approximately–1.6m to +1.6m.
Skeleton1_ShoulderCenter_Z
[Real] Contains the value for Z position of the specified joint on the specified skeleton. This is the distance from the Kinect for Windows sensor to the joint.
Note: Value ranges from 0 to 4.0m; Practical limits ranges from 1.2m to 3.5m.
Skeleton1_ShoulderCenter_TrackingState
[Enum] Current tracking status for the specified joint on the specified skeleton.
- “Not Tracked”:The joint position is not currently being tracked by the Kinect for Windows Sensor
- “Inferred”:The joint position is not currently being tracked, but is being calculated from surrounding joints
- “Tracked”:The joint position is currently being tracked by the Kinect for Windows Sensor
Skeleton1_Head_X
[Real] Contains the value for X position of the specified joint on the specified skeleton. This is the horizontal distance from the Kinect for Windows sensor.
Note: Angle of Kinect vision 57.5 degrees; Value ranges from approximately–2.2m to +2.2m.
Skeleton1_Head_Y
[Real] Contains the value for Y position of the specified joint on the specified skeleton. This is the vertical distance from the Kinect for Winows sensor.
Note: Angle of Kinect vision 43.5 degrees; Value ranges from approximately–1.6m to +1.6m.
Skeleton1_Head_Z
[Real] Contains the value for Z position of the specified joint on the specified skeleton. This is the distance from the Kinect for Windows sensor to the joint.
Note: Value ranges from 0 to 4.0m; Practical limits ranges from 1.2m to 3.5m.
Skeleton1_Head_TrackingState
[Enum] Current tracking status for the specified joint on the specified skeleton.
- “Not Tracked”:The joint position is not currently being tracked by the Kinect for Windows Sensor
- “Inferred”:The joint position is not currently being tracked, but is being calculated from surrounding joints
- “Tracked”:The joint position is currently being tracked by the Kinect for Windows Sensor
Skeleton1_ShoulderLeft_X
[Real] Contains the value for X position of the specified joint on the specified skeleton. This is the horizontal distance from the Kinect for Windows sensor.
Note: Angle of Kinect vision 57.5 degrees; Value ranges from approximately–2.2m to +2.2m.
Skeleton1_ShoulderLeft_Y
[Real] Contains the value for Y position of the specified joint on the specified skeleton. This is the vertical distance from the Kinect for Winows sensor.
Note: Angle of Kinect vision 43.5 degrees; Value ranges from approximately–1.6m to +1.6m.
Skeleton1_ShoulderLeft_Z
[Real] Contains the value for Z position of the specified joint on the specified skeleton. This is the distance from the Kinect for Windows sensor to the joint.
Note: Value ranges from 0 to 4.0m; Practical limits ranges from 1.2m to 3.5m.
Skeleton1_ShoulderLeft_TrackingState
[Enum] Current tracking status for the specified joint on the specified skeleton.
- “Not Tracked”:The joint position is not currently being tracked by the Kinect for Windows Sensor
- “Inferred”:The joint position is not currently being tracked, but is being calculated from surrounding joints
- “Tracked”:The joint position is currently being tracked by the Kinect for Windows Sensor
Skeleton1_ElbowLeft_X
[Real] Contains the value for X position of the specified joint on the specified skeleton. This is the horizontal distance from the Kinect for Windows sensor.
Note: Angle of Kinect vision 57.5 degrees; Value ranges from approximately–2.2m to +2.2m.
Skeleton1_ElbowLeft_Y
[Real] Contains the value for Y position of the specified joint on the specified skeleton. This is the vertical distance from the Kinect for Winows sensor.
Note: Angle of Kinect vision 43.5 degrees; Value ranges from approximately–1.6m to +1.6m.
Skeleton1_ElbowLeft_Z
[Real] Contains the value for Z position of the specified joint on the specified skeleton. This is the distance from the Kinect for Windows sensor to the joint.
Note: Value ranges from 0 to 4.0m; Practical limits ranges from 1.2m to 3.5m.
Skeleton1_ElbowLeft_TrackingState
[Enum] Current tracking status for the specified joint on the specified skeleton.
- “Not Tracked”:The joint position is not currently being tracked by the Kinect for Windows Sensor
- “Inferred”:The joint position is not currently being tracked, but is being calculated from surrounding joints
- “Tracked”:The joint position is currently being tracked by the Kinect for Windows Sensor
Skeleton1_WristLeft_X
[Real] Contains the value for X position of the specified joint on the specified skeleton. This is the horizontal distance from the Kinect for Windows sensor.
Note: Angle of Kinect vision 57.5 degrees; Value ranges from approximately–2.2m to +2.2m.
Skeleton1_WristLeft_Y
[Real] Contains the value for Y position of the specified joint on the specified skeleton. This is the vertical distance from the Kinect for Winows sensor.
Note: Angle of Kinect vision 43.5 degrees; Value ranges from approximately–1.6m to +1.6m.
Skeleton1_WristLeft_Z
[Real] Contains the value for Z position of the specified joint on the specified skeleton. This is the distance from the Kinect for Windows sensor to the joint.
Note: Value ranges from 0 to 4.0m; Practical limits ranges from 1.2m to 3.5m.
Skeleton1_WristLeft_TrackingState
[Enum] Current tracking status for the specified joint on the specified skeleton.
- “Not Tracked”:The joint position is not currently being tracked by the Kinect for Windows Sensor
- “Inferred”:The joint position is not currently being tracked, but is being calculated from surrounding joints
- “Tracked”:The joint position is currently being tracked by the Kinect for Windows Sensor
Skeleton1_HandLeft_X
[Real] Contains the value for X position of the specified joint on the specified skeleton. This is the horizontal distance from the Kinect for Windows sensor.
Note: Angle of Kinect vision 57.5 degrees; Value ranges from approximately–2.2m to +2.2m.
Skeleton1_HandLeft_Y
[Real] Contains the value for Y position of the specified joint on the specified skeleton. This is the vertical distance from the Kinect for Winows sensor.
Note: Angle of Kinect vision 43.5 degrees; Value ranges from approximately–1.6m to +1.6m.
Skeleton1_HandLeft_Z
[Real] Contains the value for Z position of the specified joint on the specified skeleton. This is the distance from the Kinect for Windows sensor to the joint.
Note: Value ranges from 0 to 4.0m; Practical limits ranges from 1.2m to 3.5m.
Skeleton1_HandLeft_TrackingState
[Enum] Current tracking status for the specified joint on the specified skeleton.
- “Not Tracked”:The joint position is not currently being tracked by the Kinect for Windows Sensor
- “Inferred”:The joint position is not currently being tracked, but is being calculated from surrounding joints
- “Tracked”:The joint position is currently being tracked by the Kinect for Windows Sensor
Skeleton1_ShoulderRight_X
[Real] Contains the value for X position of the specified joint on the specified skeleton. This is the horizontal distance from the Kinect for Windows sensor.
Note: Angle of Kinect vision 57.5 degrees; Value ranges from approximately–2.2m to +2.2m.
Skeleton1_ShoulderRight_Y
[Real] Contains the value for Y position of the specified joint on the specified skeleton. This is the vertical distance from the Kinect for Winows sensor.
Note: Angle of Kinect vision 43.5 degrees; Value ranges from approximately–1.6m to +1.6m.
Skeleton1_ShoulderRight_Z
[Real] Contains the value for Z position of the specified joint on the specified skeleton. This is the distance from the Kinect for Windows sensor to the joint.
Note: Value ranges from 0 to 4.0m; Practical limits ranges from 1.2m to 3.5m.
Skeleton1_ShoulderRight_TrackingState
[Enum] Current tracking status for the specified joint on the specified skeleton.
- “Not Tracked”:The joint position is not currently being tracked by the Kinect for Windows Sensor
- “Inferred”:The joint position is not currently being tracked, but is being calculated from surrounding joints
- “Tracked”:The joint position is currently being tracked by the Kinect for Windows Sensor
Skeleton1_ElbowRight_X
[Real] Contains the value for X position of the specified joint on the specified skeleton. This is the horizontal distance from the Kinect for Windows sensor.
Note: Angle of Kinect vision 57.5 degrees; Value ranges from approximately–2.2m to +2.2m.
Skeleton1_ElbowRight_Y
[Real] Contains the value for Y position of the specified joint on the specified skeleton. This is the vertical distance from the Kinect for Winows sensor.
Note: Angle of Kinect vision 43.5 degrees; Value ranges from approximately–1.6m to +1.6m.
Skeleton1_ElbowRight_Z
[Real] Contains the value for Z position of the specified joint on the specified skeleton. This is the distance from the Kinect for Windows sensor to the joint.
Note: Value ranges from 0 to 4.0m; Practical limits ranges from 1.2m to 3.5m.
Skeleton1_ElbowRight_TrackingState
[Enum] Current tracking status for the specified joint on the specified skeleton.
- “Not Tracked”:The joint position is not currently being tracked by the Kinect for Windows Sensor
- “Inferred”:The joint position is not currently being tracked, but is being calculated from surrounding joints
- “Tracked”:The joint position is currently being tracked by the Kinect for Windows Sensor
Skeleton1_WristRight_X
[Real] Contains the value for X position of the specified joint on the specified skeleton. This is the horizontal distance from the Kinect for Windows sensor.
Note: Angle of Kinect vision 57.5 degrees; Value ranges from approximately–2.2m to +2.2m.
Skeleton1_WristRight_Y
[Real] Contains the value for Y position of the specified joint on the specified skeleton. This is the vertical distance from the Kinect for Winows sensor.
Note: Angle of Kinect vision 43.5 degrees; Value ranges from approximately–1.6m to +1.6m.
Skeleton1_WristRight_Z
[Real] Contains the value for Z position of the specified joint on the specified skeleton. This is the distance from the Kinect for Windows sensor to the joint.
Note: Value ranges from 0 to 4.0m; Practical limits ranges from 1.2m to 3.5m.
Skeleton1_WristRight_TrackingState
[Enum] Current tracking status for the specified joint on the specified skeleton.
- “Not Tracked”:The joint position is not currently being tracked by the Kinect for Windows Sensor
- “Inferred”:The joint position is not currently being tracked, but is being calculated from surrounding joints
- “Tracked”:The joint position is currently being tracked by the Kinect for Windows Sensor
Skeleton1_HandRight_X
[Real] Contains the value for X position of the specified joint on the specified skeleton. This is the horizontal distance from the Kinect for Windows sensor.
Note: Angle of Kinect vision 57.5 degrees; Value ranges from approximately–2.2m to +2.2m.
Skeleton1_HandRight_Y
[Real] Contains the value for Y position of the specified joint on the specified skeleton. This is the vertical distance from the Kinect for Winows sensor.
Note: Angle of Kinect vision 43.5 degrees; Value ranges from approximately–1.6m to +1.6m.
Skeleton1_HandRight_Z
[Real] Contains the value for Z position of the specified joint on the specified skeleton. This is the distance from the Kinect for Windows sensor to the joint.
Note: Value ranges from 0 to 4.0m; Practical limits ranges from 1.2m to 3.5m.
Skeleton1_HandRight_TrackingState
[Enum] Current tracking status for the specified joint on the specified skeleton.
- “Not Tracked”:The joint position is not currently being tracked by the Kinect for Windows Sensor
- “Inferred”:The joint position is not currently being tracked, but is being calculated from surrounding joints
- “Tracked”:The joint position is currently being tracked by the Kinect for Windows Sensor
Skeleton1_HipLeft_X
[Real] Contains the value for X position of the specified joint on the specified skeleton. This is the horizontal distance from the Kinect for Windows sensor.
Note: Angle of Kinect vision 57.5 degrees; Value ranges from approximately–2.2m to +2.2m.
Skeleton1_HipLeft_Y
[Real] Contains the value for Y position of the specified joint on the specified skeleton. This is the vertical distance from the Kinect for Winows sensor.
Note: Angle of Kinect vision 43.5 degrees; Value ranges from approximately–1.6m to +1.6m.
Skeleton1_HipLeft_Z
[Real] Contains the value for Z position of the specified joint on the specified skeleton. This is the distance from the Kinect for Windows sensor to the joint.
Note: Value ranges from 0 to 4.0m; Practical limits ranges from 1.2m to 3.5m.
Skeleton1_HipLeft_TrackingState
[Enum] Current tracking status for the specified joint on the specified skeleton.
- “Not Tracked”:The joint position is not currently being tracked by the Kinect for Windows Sensor
- “Inferred”:The joint position is not currently being tracked, but is being calculated from surrounding joints
- “Tracked”:The joint position is currently being tracked by the Kinect for Windows Sensor
Skeleton1_KneeLeft_X
[Real] Contains the value for X position of the specified joint on the specified skeleton. This is the horizontal distance from the Kinect for Windows sensor.
Note: Angle of Kinect vision 57.5 degrees; Value ranges from approximately–2.2m to +2.2m.
Skeleton1_KneeLeft_Y
[Real] Contains the value for Y position of the specified joint on the specified skeleton. This is the vertical distance from the Kinect for Winows sensor.
Note: Angle of Kinect vision 43.5 degrees; Value ranges from approximately–1.6m to +1.6m.
Skeleton1_KneeLeft_Z
[Real] Contains the value for Z position of the specified joint on the specified skeleton. This is the distance from the Kinect for Windows sensor to the joint.
Note: Value ranges from 0 to 4.0m; Practical limits ranges from 1.2m to 3.5m.
Skeleton1_KneeLeft_TrackingState
[Enum] Current tracking status for the specified joint on the specified skeleton.
- “Not Tracked”:The joint position is not currently being tracked by the Kinect for Windows Sensor
- “Inferred”:The joint position is not currently being tracked, but is being calculated from surrounding joints
- “Tracked”:The joint position is currently being tracked by the Kinect for Windows Sensor
Skeleton1_AnkleLeft_X
[Real] Contains the value for X position of the specified joint on the specified skeleton. This is the horizontal distance from the Kinect for Windows sensor.
Note: Angle of Kinect vision 57.5 degrees; Value ranges from approximately–2.2m to +2.2m.
Skeleton1_AnkleLeft_Y
[Real] Contains the value for Y position of the specified joint on the specified skeleton. This is the vertical distance from the Kinect for Winows sensor.
Note: Angle of Kinect vision 43.5 degrees; Value ranges from approximately–1.6m to +1.6m.
Skeleton1_AnkleLeft_Z
[Real] Contains the value for Z position of the specified joint on the specified skeleton. This is the distance from the Kinect for Windows sensor to the joint.
Note: Value ranges from 0 to 4.0m; Practical limits ranges from 1.2m to 3.5m.
Skeleton1_AnkleLeft_TrackingState
[Enum] Current tracking status for the specified joint on the specified skeleton.
- “Not Tracked”:The joint position is not currently being tracked by the Kinect for Windows Sensor
- “Inferred”:The joint position is not currently being tracked, but is being calculated from surrounding joints
- “Tracked”:The joint position is currently being tracked by the Kinect for Windows Sensor
Skeleton1_FootLeft_X
[Real] Contains the value for X position of the specified joint on the specified skeleton. This is the horizontal distance from the Kinect for Windows sensor.
Note: Angle of Kinect vision 57.5 degrees; Value ranges from approximately–2.2m to +2.2m.
Skeleton1_FootLeft_Y
[Real] Contains the value for Y position of the specified joint on the specified skeleton. This is the vertical distance from the Kinect for Winows sensor.
Note: Angle of Kinect vision 43.5 degrees; Value ranges from approximately–1.6m to +1.6m.
Skeleton1_FootLeft_Z
[Real] Contains the value for Z position of the specified joint on the specified skeleton. This is the distance from the Kinect for Windows sensor to the joint.
Note: Value ranges from 0 to 4.0m; Practical limits ranges from 1.2m to 3.5m.
Skeleton1_FootLeft_TrackingState
[Enum] Current tracking status for the specified joint on the specified skeleton.
- “Not Tracked”:The joint position is not currently being tracked by the Kinect for Windows Sensor
- “Inferred”:The joint position is not currently being tracked, but is being calculated from surrounding joints
- “Tracked”:The joint position is currently being tracked by the Kinect for Windows Sensor
Skeleton1_HipRight_X
[Real] Contains the value for X position of the specified joint on the specified skeleton. This is the horizontal distance from the Kinect for Windows sensor.
Note: Angle of Kinect vision 57.5 degrees; Value ranges from approximately–2.2m to +2.2m.
Skeleton1_HipRight_Y
[Real] Contains the value for Y position of the specified joint on the specified skeleton. This is the vertical distance from the Kinect for Winows sensor.
Note: Angle of Kinect vision 43.5 degrees; Value ranges from approximately–1.6m to +1.6m.
Skeleton1_HipRight_Z
[Real] Contains the value for Z position of the specified joint on the specified skeleton. This is the distance from the Kinect for Windows sensor to the joint.
Note: Value ranges from 0 to 4.0m; Practical limits ranges from 1.2m to 3.5m.
Skeleton1_HipRight_TrackingState
[Enum] Current tracking status for the specified joint on the specified skeleton.
- “Not Tracked”:The joint position is not currently being tracked by the Kinect for Windows Sensor
- “Inferred”:The joint position is not currently being tracked, but is being calculated from surrounding joints
- “Tracked”:The joint position is currently being tracked by the Kinect for Windows Sensor
Skeleton1_KneeRight_X
[Real] Contains the value for X position of the specified joint on the specified skeleton. This is the horizontal distance from the Kinect for Windows sensor.
Note: Angle of Kinect vision 57.5 degrees; Value ranges from approximately–2.2m to +2.2m.
Skeleton1_KneeRight_Y
[Real] Contains the value for Y position of the specified joint on the specified skeleton. This is the vertical distance from the Kinect for Winows sensor.
Note: Angle of Kinect vision 43.5 degrees; Value ranges from approximately–1.6m to +1.6m.
Skeleton1_KneeRight_Z
[Real] Contains the value for Z position of the specified joint on the specified skeleton. This is the distance from the Kinect for Windows sensor to the joint.
Note: Value ranges from 0 to 4.0m; Practical limits ranges from 1.2m to 3.5m.
Skeleton1_KneeRight_TrackingState
[Enum] Current tracking status for the specified joint on the specified skeleton.
- “Not Tracked”:The joint position is not currently being tracked by the Kinect for Windows Sensor
- “Inferred”:The joint position is not currently being tracked, but is being calculated from surrounding joints
- “Tracked”:The joint position is currently being tracked by the Kinect for Windows Sensor
Skeleton1_AnkleRight_X
[Real] Contains the value for X position of the specified joint on the specified skeleton. This is the horizontal distance from the Kinect for Windows sensor.
Note: Angle of Kinect vision 57.5 degrees; Value ranges from approximately–2.2m to +2.2m.
Skeleton1_AnkleRight_Y
[Real] Contains the value for Y position of the specified joint on the specified skeleton. This is the vertical distance from the Kinect for Winows sensor.
Note: Angle of Kinect vision 43.5 degrees; Value ranges from approximately–1.6m to +1.6m.
Skeleton1_AnkleRight_Z
[Real] Contains the value for Z position of the specified joint on the specified skeleton. This is the distance from the Kinect for Windows sensor to the joint.
Note: Value ranges from 0 to 4.0m; Practical limits ranges from 1.2m to 3.5m.
Skeleton1_AnkleRight_TrackingState
[Enum] Current tracking status for the specified joint on the specified skeleton.
- “Not Tracked”:The joint position is not currently being tracked by the Kinect for Windows Sensor
- “Inferred”:The joint position is not currently being tracked, but is being calculated from surrounding joints
- “Tracked”:The joint position is currently being tracked by the Kinect for Windows Sensor
Skeleton1_FootRight_X
[Real] Contains the value for X position of the specified joint on the specified skeleton. This is the horizontal distance from the Kinect for Windows sensor.
Note: Angle of Kinect vision 57.5 degrees; Value ranges from approximately–2.2m to +2.2m.
Skeleton1_FootRight_Y
[Real] Contains the value for Y position of the specified joint on the specified skeleton. This is the vertical distance from the Kinect for Winows sensor.
Note: Angle of Kinect vision 43.5 degrees; Value ranges from approximately–1.6m to +1.6m.
Skeleton1_FootRight_Z
[Real] Contains the value for Z position of the specified joint on the specified skeleton. This is the distance from the Kinect for Windows sensor to the joint.
Note: Value ranges from 0 to 4.0m; Practical limits ranges from 1.2m to 3.5m.
Skeleton1_FootRight_TrackingState
[Enum] Current tracking status for the specified joint on the specified skeleton.
- “Not Tracked”:The joint position is not currently being tracked by the Kinect for Windows Sensor
- “Inferred”:The joint position is not currently being tracked, but is being calculated from surrounding joints
- “Tracked”:The joint position is currently being tracked by the Kinect for Windows Sensor
Skeleton2_TrackingId
[Integer] Contains the ID for the first skeleton being tracked.
Note: Note that, if a user leaves the scene and comes back, it will receive a new tracking ID chosen randomly. It will not be related to the one he/she had when left the scene.
Skeleton2_HipCenter_X
[Real] Contains the value for X position of the specified joint on the specified skeleton. This is the horizontal distance from the Kinect for Windows sensor.
Note: Angle of Kinect vision 57.5 degrees; Value ranges from approximately–2.2m to +2.2m.
Skeleton2_HipCenter_Y
[Real] Contains the value for Y position of the specified joint on the specified skeleton. This is the vertical distance from the Kinect for Winows sensor.
Note: Angle of Kinect vision 43.5 degrees; Value ranges from approximately–1.6m to +1.6m.
Skeleton2_HipCenter_Z
[Real] Contains the value for Z position of the specified joint on the specified skeleton. This is the distance from the Kinect for Windows sensor to the joint.
Note: Value ranges from 0 to 4.0m; Practical limits ranges from 1.2m to 3.5m.
Skeleton2_HipCenter_TrackingState
[Enum] Current tracking status for the specified joint on the specified skeleton.
- “Not Tracked”:The joint position is not currently being tracked by the Kinect for Windows Sensor
- “Inferred”:The joint position is not currently being tracked, but is being calculated from surrounding joints
- “Tracked”:The joint position is currently being tracked by the Kinect for Windows Sensor
Skeleton2_Spine_X
[Real] Contains the value for X position of the specified joint on the specified skeleton. This is the horizontal distance from the Kinect for Windows sensor.
Note: Angle of Kinect vision 57.5 degrees; Value ranges from approximately–2.2m to +2.2m.
Skeleton2_Spine_Y
[Real] Contains the value for Y position of the specified joint on the specified skeleton. This is the vertical distance from the Kinect for Winows sensor.
Note: Angle of Kinect vision 43.5 degrees; Value ranges from approximately–1.6m to +1.6m.
Skeleton2_Spine_Z
[Real] Contains the value for Z position of the specified joint on the specified skeleton. This is the distance from the Kinect for Windows sensor to the joint.
Note: Value ranges from 0 to 4.0m; Practical limits ranges from 1.2m to 3.5m.
Skeleton2_Spine_TrackingState
[Enum] Current tracking status for the specified joint on the specified skeleton.
- “Not Tracked”:The joint position is not currently being tracked by the Kinect for Windows Sensor
- “Inferred”:The joint position is not currently being tracked, but is being calculated from surrounding joints
- “Tracked”:The joint position is currently being tracked by the Kinect for Windows Sensor
Skeleton2_ShoulderCenter_X
[Real] Contains the value for X position of the specified joint on the specified skeleton. This is the horizontal distance from the Kinect for Windows sensor.
Note: Angle of Kinect vision 57.5 degrees; Value ranges from approximately–2.2m to +2.2m.
Skeleton2_ShoulderCenter_Y
[Real] Contains the value for Y position of the specified joint on the specified skeleton. This is the vertical distance from the Kinect for Winows sensor.
Note: Angle of Kinect vision 43.5 degrees; Value ranges from approximately–1.6m to +1.6m.
Skeleton2_ShoulderCenter_Z
[Real] Contains the value for Z position of the specified joint on the specified skeleton. This is the distance from the Kinect for Windows sensor to the joint.
Note: Value ranges from 0 to 4.0m; Practical limits ranges from 1.2m to 3.5m.
Skeleton2_ShoulderCenter_TrackingState
[Enum] Current tracking status for the specified joint on the specified skeleton.
- “Not Tracked”:The joint position is not currently being tracked by the Kinect for Windows Sensor
- “Inferred”:The joint position is not currently being tracked, but is being calculated from surrounding joints
- “Tracked”:The joint position is currently being tracked by the Kinect for Windows Sensor
Skeleton2_Head_X
[Real] Contains the value for X position of the specified joint on the specified skeleton. This is the horizontal distance from the Kinect for Windows sensor.
Note: Angle of Kinect vision 57.5 degrees; Value ranges from approximately–2.2m to +2.2m.
Skeleton2_Head_Y
[Real] Contains the value for Y position of the specified joint on the specified skeleton. This is the vertical distance from the Kinect for Winows sensor.
Note: Angle of Kinect vision 43.5 degrees; Value ranges from approximately–1.6m to +1.6m.
Skeleton2_Head_Z
[Real] Contains the value for Z position of the specified joint on the specified skeleton. This is the distance from the Kinect for Windows sensor to the joint.
Note: Value ranges from 0 to 4.0m; Practical limits ranges from 1.2m to 3.5m.
Skeleton2_Head_TrackingState
[Enum] Current tracking status for the specified joint on the specified skeleton.
- “Not Tracked”:The joint position is not currently being tracked by the Kinect for Windows Sensor
- “Inferred”:The joint position is not currently being tracked, but is being calculated from surrounding joints
- “Tracked”:The joint position is currently being tracked by the Kinect for Windows Sensor
Skeleton2_ShoulderLeft_X
[Real] Contains the value for X position of the specified joint on the specified skeleton. This is the horizontal distance from the Kinect for Windows sensor.
Note: Angle of Kinect vision 57.5 degrees; Value ranges from approximately–2.2m to +2.2m.
Skeleton2_ShoulderLeft_Y
[Real] Contains the value for Y position of the specified joint on the specified skeleton. This is the vertical distance from the Kinect for Winows sensor.
Note: Angle of Kinect vision 43.5 degrees; Value ranges from approximately–1.6m to +1.6m.
Skeleton2_ShoulderLeft_Z
[Real] Contains the value for Z position of the specified joint on the specified skeleton. This is the distance from the Kinect for Windows sensor to the joint.
Note: Value ranges from 0 to 4.0m; Practical limits ranges from 1.2m to 3.5m.
Skeleton2_ShoulderLeft_TrackingState
[Enum] Current tracking status for the specified joint on the specified skeleton.
- “Not Tracked”:The joint position is not currently being tracked by the Kinect for Windows Sensor
- “Inferred”:The joint position is not currently being tracked, but is being calculated from surrounding joints
- “Tracked”:The joint position is currently being tracked by the Kinect for Windows Sensor
Skeleton2_ElbowLeft_X
[Real] Contains the value for X position of the specified joint on the specified skeleton. This is the horizontal distance from the Kinect for Windows sensor.
Note: Angle of Kinect vision 57.5 degrees; Value ranges from approximately–2.2m to +2.2m.
Skeleton2_ElbowLeft_Y
[Real] Contains the value for Y position of the specified joint on the specified skeleton. This is the vertical distance from the Kinect for Winows sensor.
Note: Angle of Kinect vision 43.5 degrees; Value ranges from approximately–1.6m to +1.6m.
Skeleton2_ElbowLeft_Z
[Real] Contains the value for Z position of the specified joint on the specified skeleton. This is the distance from the Kinect for Windows sensor to the joint.
Note: Value ranges from 0 to 4.0m; Practical limits ranges from 1.2m to 3.5m.
Skeleton2_ElbowLeft_TrackingState
[Enum] Current tracking status for the specified joint on the specified skeleton.
- “Not Tracked”:The joint position is not currently being tracked by the Kinect for Windows Sensor
- “Inferred”:The joint position is not currently being tracked, but is being calculated from surrounding joints
- “Tracked”:The joint position is currently being tracked by the Kinect for Windows Sensor
Skeleton2_WristLeft_X
[Real] Contains the value for X position of the specified joint on the specified skeleton. This is the horizontal distance from the Kinect for Windows sensor.
Note: Angle of Kinect vision 57.5 degrees; Value ranges from approximately–2.2m to +2.2m.
Skeleton2_WristLeft_Y
[Real] Contains the value for Y position of the specified joint on the specified skeleton. This is the vertical distance from the Kinect for Winows sensor.
Note: Angle of Kinect vision 43.5 degrees; Value ranges from approximately–1.6m to +1.6m.
Skeleton2_WristLeft_Z
[Real] Contains the value for Z position of the specified joint on the specified skeleton. This is the distance from the Kinect for Windows sensor to the joint.
Note: Value ranges from 0 to 4.0m; Practical limits ranges from 1.2m to 3.5m.
Skeleton2_WristLeft_TrackingState
[Enum] Current tracking status for the specified joint on the specified skeleton.
- “Not Tracked”:The joint position is not currently being tracked by the Kinect for Windows Sensor
- “Inferred”:The joint position is not currently being tracked, but is being calculated from surrounding joints
- “Tracked”:The joint position is currently being tracked by the Kinect for Windows Sensor
Skeleton2_HandLeft_X
[Real] Contains the value for X position of the specified joint on the specified skeleton. This is the horizontal distance from the Kinect for Windows sensor.
Note: Angle of Kinect vision 57.5 degrees; Value ranges from approximately–2.2m to +2.2m.
Skeleton2_HandLeft_Y
[Real] Contains the value for Y position of the specified joint on the specified skeleton. This is the vertical distance from the Kinect for Winows sensor.
Note: Angle of Kinect vision 43.5 degrees; Value ranges from approximately–1.6m to +1.6m.
Skeleton2_HandLeft_Z
[Real] Contains the value for Z position of the specified joint on the specified skeleton. This is the distance from the Kinect for Windows sensor to the joint.
Note: Value ranges from 0 to 4.0m; Practical limits ranges from 1.2m to 3.5m.
Skeleton2_HandLeft_TrackingState
[Enum] Current tracking status for the specified joint on the specified skeleton.
- “Not Tracked”:The joint position is not currently being tracked by the Kinect for Windows Sensor
- “Inferred”:The joint position is not currently being tracked, but is being calculated from surrounding joints
- “Tracked”:The joint position is currently being tracked by the Kinect for Windows Sensor
Skeleton2_ShoulderRight_X
[Real] Contains the value for X position of the specified joint on the specified skeleton. This is the horizontal distance from the Kinect for Windows sensor.
Note: Angle of Kinect vision 57.5 degrees; Value ranges from approximately–2.2m to +2.2m.
Skeleton2_ShoulderRight_Y
[Real] Contains the value for Y position of the specified joint on the specified skeleton. This is the vertical distance from the Kinect for Winows sensor.
Note: Angle of Kinect vision 43.5 degrees; Value ranges from approximately–1.6m to +1.6m.
Skeleton2_ShoulderRight_Z
[Real] Contains the value for Z position of the specified joint on the specified skeleton. This is the distance from the Kinect for Windows sensor to the joint.
Note: Value ranges from 0 to 4.0m; Practical limits ranges from 1.2m to 3.5m.
Skeleton2_ShoulderRight_TrackingState
[Enum] Current tracking status for the specified joint on the specified skeleton.
- “Not Tracked”:The joint position is not currently being tracked by the Kinect for Windows Sensor
- “Inferred”:The joint position is not currently being tracked, but is being calculated from surrounding joints
- “Tracked”:The joint position is currently being tracked by the Kinect for Windows Sensor
Skeleton2_ElbowRight_X
[Real] Contains the value for X position of the specified joint on the specified skeleton. This is the horizontal distance from the Kinect for Windows sensor.
Note: Angle of Kinect vision 57.5 degrees; Value ranges from approximately–2.2m to +2.2m.
Skeleton2_ElbowRight_Y
[Real] Contains the value for Y position of the specified joint on the specified skeleton. This is the vertical distance from the Kinect for Winows sensor.
Note: Angle of Kinect vision 43.5 degrees; Value ranges from approximately–1.6m to +1.6m.
Skeleton2_ElbowRight_Z
[Real] Contains the value for Z position of the specified joint on the specified skeleton. This is the distance from the Kinect for Windows sensor to the joint.
Note: Value ranges from 0 to 4.0m; Practical limits ranges from 1.2m to 3.5m.
Skeleton2_ElbowRight_TrackingState
[Enum] Current tracking status for the specified joint on the specified skeleton.
- “Not Tracked”:The joint position is not currently being tracked by the Kinect for Windows Sensor
- “Inferred”:The joint position is not currently being tracked, but is being calculated from surrounding joints
- “Tracked”:The joint position is currently being tracked by the Kinect for Windows Sensor
Skeleton2_WristRight_X
[Real] Contains the value for X position of the specified joint on the specified skeleton. This is the horizontal distance from the Kinect for Windows sensor.
Note: Angle of Kinect vision 57.5 degrees; Value ranges from approximately–2.2m to +2.2m.
Skeleton2_WristRight_Y
[Real] Contains the value for Y position of the specified joint on the specified skeleton. This is the vertical distance from the Kinect for Winows sensor.
Note: Angle of Kinect vision 43.5 degrees; Value ranges from approximately–1.6m to +1.6m.
Skeleton2_WristRight_Z
[Real] Contains the value for Z position of the specified joint on the specified skeleton. This is the distance from the Kinect for Windows sensor to the joint.
Note: Value ranges from 0 to 4.0m; Practical limits ranges from 1.2m to 3.5m.
Skeleton2_WristRight_TrackingState
[Enum] Current tracking status for the specified joint on the specified skeleton.
- “Not Tracked”:The joint position is not currently being tracked by the Kinect for Windows Sensor
- “Inferred”:The joint position is not currently being tracked, but is being calculated from surrounding joints
- “Tracked”:The joint position is currently being tracked by the Kinect for Windows Sensor
Skeleton2_HandRight_X
[Real] Contains the value for X position of the specified joint on the specified skeleton. This is the horizontal distance from the Kinect for Windows sensor.
Note: Angle of Kinect vision 57.5 degrees; Value ranges from approximately–2.2m to +2.2m.
Skeleton2_HandRight_Y
[Real] Contains the value for Y position of the specified joint on the specified skeleton. This is the vertical distance from the Kinect for Winows sensor.
Note: Angle of Kinect vision 43.5 degrees; Value ranges from approximately–1.6m to +1.6m.
Skeleton2_HandRight_Z
[Real] Contains the value for Z position of the specified joint on the specified skeleton. This is the distance from the Kinect for Windows sensor to the joint.
Note: Value ranges from 0 to 4.0m; Practical limits ranges from 1.2m to 3.5m.
Skeleton2_HandRight_TrackingState
[Enum] Current tracking status for the specified joint on the specified skeleton.
- “Not Tracked”:The joint position is not currently being tracked by the Kinect for Windows Sensor
- “Inferred”:The joint position is not currently being tracked, but is being calculated from surrounding joints
- “Tracked”:The joint position is currently being tracked by the Kinect for Windows Sensor
Skeleton2_HipLeft_X
[Real] Contains the value for X position of the specified joint on the specified skeleton. This is the horizontal distance from the Kinect for Windows sensor.
Note: Angle of Kinect vision 57.5 degrees; Value ranges from approximately–2.2m to +2.2m.
Skeleton2_HipLeft_Y
[Real] Contains the value for Y position of the specified joint on the specified skeleton. This is the vertical distance from the Kinect for Winows sensor.
Note: Angle of Kinect vision 43.5 degrees; Value ranges from approximately–1.6m to +1.6m.
Skeleton2_HipLeft_Z
[Real] Contains the value for Z position of the specified joint on the specified skeleton. This is the distance from the Kinect for Windows sensor to the joint.
Note: Value ranges from 0 to 4.0m; Practical limits ranges from 1.2m to 3.5m.
Skeleton2_HipLeft_TrackingState
[Enum] Current tracking status for the specified joint on the specified skeleton.
- “Not Tracked”:The joint position is not currently being tracked by the Kinect for Windows Sensor
- “Inferred”:The joint position is not currently being tracked, but is being calculated from surrounding joints
- “Tracked”:The joint position is currently being tracked by the Kinect for Windows Sensor
Skeleton2_KneeLeft_X
[Real] Contains the value for X position of the specified joint on the specified skeleton. This is the horizontal distance from the Kinect for Windows sensor.
Note: Angle of Kinect vision 57.5 degrees; Value ranges from approximately–2.2m to +2.2m.
Skeleton2_KneeLeft_Y
[Real] Contains the value for Y position of the specified joint on the specified skeleton. This is the vertical distance from the Kinect for Winows sensor.
Note: Angle of Kinect vision 43.5 degrees; Value ranges from approximately–1.6m to +1.6m.
Skeleton2_KneeLeft_Z
[Real] Contains the value for Z position of the specified joint on the specified skeleton. This is the distance from the Kinect for Windows sensor to the joint.
Note: Value ranges from 0 to 4.0m; Practical limits ranges from 1.2m to 3.5m.
Skeleton2_KneeLeft_TrackingState
[Enum] Current tracking status for the specified joint on the specified skeleton.
- “Not Tracked”:The joint position is not currently being tracked by the Kinect for Windows Sensor
- “Inferred”:The joint position is not currently being tracked, but is being calculated from surrounding joints
- “Tracked”:The joint position is currently being tracked by the Kinect for Windows Sensor
Skeleton2_AnkleLeft_X
[Real] Contains the value for X position of the specified joint on the specified skeleton. This is the horizontal distance from the Kinect for Windows sensor.
Note: Angle of Kinect vision 57.5 degrees; Value ranges from approximately–2.2m to +2.2m.
Skeleton2_AnkleLeft_Y
[Real] Contains the value for Y position of the specified joint on the specified skeleton. This is the vertical distance from the Kinect for Winows sensor.
Note: Angle of Kinect vision 43.5 degrees; Value ranges from approximately–1.6m to +1.6m.
Skeleton2_AnkleLeft_Z
[Real] Contains the value for Z position of the specified joint on the specified skeleton. This is the distance from the Kinect for Windows sensor to the joint.
Note: Value ranges from 0 to 4.0m; Practical limits ranges from 1.2m to 3.5m.
Skeleton2_AnkleLeft_TrackingState
[Enum] Current tracking status for the specified joint on the specified skeleton.
- “Not Tracked”:The joint position is not currently being tracked by the Kinect for Windows Sensor
- “Inferred”:The joint position is not currently being tracked, but is being calculated from surrounding joints
- “Tracked”:The joint position is currently being tracked by the Kinect for Windows Sensor
Skeleton2_FootLeft_X
[Real] Contains the value for X position of the specified joint on the specified skeleton. This is the horizontal distance from the Kinect for Windows sensor.
Note: Angle of Kinect vision 57.5 degrees; Value ranges from approximately–2.2m to +2.2m.
Skeleton2_FootLeft_Y
[Real] Contains the value for Y position of the specified joint on the specified skeleton. This is the vertical distance from the Kinect for Winows sensor.
Note: Angle of Kinect vision 43.5 degrees; Value ranges from approximately–1.6m to +1.6m.
Skeleton2_FootLeft_Z
[Real] Contains the value for Z position of the specified joint on the specified skeleton. This is the distance from the Kinect for Windows sensor to the joint.
Note: Value ranges from 0 to 4.0m; Practical limits ranges from 1.2m to 3.5m.
Skeleton2_FootLeft_TrackingState
[Enum] Current tracking status for the specified joint on the specified skeleton.
- “Not Tracked”:The joint position is not currently being tracked by the Kinect for Windows Sensor
- “Inferred”:The joint position is not currently being tracked, but is being calculated from surrounding joints
- “Tracked”:The joint position is currently being tracked by the Kinect for Windows Sensor
Skeleton2_HipRight_X
[Real] Contains the value for X position of the specified joint on the specified skeleton. This is the horizontal distance from the Kinect for Windows sensor.
Note: Angle of Kinect vision 57.5 degrees; Value ranges from approximately–2.2m to +2.2m.
Skeleton2_HipRight_Y
[Real] Contains the value for Y position of the specified joint on the specified skeleton. This is the vertical distance from the Kinect for Winows sensor.
Note: Angle of Kinect vision 43.5 degrees; Value ranges from approximately–1.6m to +1.6m.
Skeleton2_HipRight_Z
[Real] Contains the value for Z position of the specified joint on the specified skeleton. This is the distance from the Kinect for Windows sensor to the joint.
Note: Value ranges from 0 to 4.0m; Practical limits ranges from 1.2m to 3.5m.
Skeleton2_HipRight_TrackingState
[Enum] Current tracking status for the specified joint on the specified skeleton.
- “Not Tracked”:The joint position is not currently being tracked by the Kinect for Windows Sensor
- “Inferred”:The joint position is not currently being tracked, but is being calculated from surrounding joints
- “Tracked”:The joint position is currently being tracked by the Kinect for Windows Sensor
Skeleton2_KneeRight_X
[Real] Contains the value for X position of the specified joint on the specified skeleton. This is the horizontal distance from the Kinect for Windows sensor.
Note: Angle of Kinect vision 57.5 degrees; Value ranges from approximately–2.2m to +2.2m.
Skeleton2_KneeRight_Y
[Real] Contains the value for Y position of the specified joint on the specified skeleton. This is the vertical distance from the Kinect for Winows sensor.
Note: Angle of Kinect vision 43.5 degrees; Value ranges from approximately–1.6m to +1.6m.
Skeleton2_KneeRight_Z
[Real] Contains the value for Z position of the specified joint on the specified skeleton. This is the distance from the Kinect for Windows sensor to the joint.
Note: Value ranges from 0 to 4.0m; Practical limits ranges from 1.2m to 3.5m.
Skeleton2_KneeRight_TrackingState
[Enum] Current tracking status for the specified joint on the specified skeleton.
- “Not Tracked”:The joint position is not currently being tracked by the Kinect for Windows Sensor
- “Inferred”:The joint position is not currently being tracked, but is being calculated from surrounding joints
- “Tracked”:The joint position is currently being tracked by the Kinect for Windows Sensor
Skeleton2_AnkleRight_X
[Real] Contains the value for X position of the specified joint on the specified skeleton. This is the horizontal distance from the Kinect for Windows sensor.
Note: Angle of Kinect vision 57.5 degrees; Value ranges from approximately–2.2m to +2.2m.
Skeleton2_AnkleRight_Y
[Real] Contains the value for Y position of the specified joint on the specified skeleton. This is the vertical distance from the Kinect for Winows sensor.
Note: Angle of Kinect vision 43.5 degrees; Value ranges from approximately–1.6m to +1.6m.
Skeleton2_AnkleRight_Z
[Real] Contains the value for Z position of the specified joint on the specified skeleton. This is the distance from the Kinect for Windows sensor to the joint.
Note: Value ranges from 0 to 4.0m; Practical limits ranges from 1.2m to 3.5m.
Skeleton2_AnkleRight_TrackingState
[Enum] Current tracking status for the specified joint on the specified skeleton.
- “Not Tracked”:The joint position is not currently being tracked by the Kinect for Windows Sensor
- “Inferred”:The joint position is not currently being tracked, but is being calculated from surrounding joints
- “Tracked”:The joint position is currently being tracked by the Kinect for Windows Sensor
Skeleton2_FootRight_X
[Real] Contains the value for X position of the specified joint on the specified skeleton. This is the horizontal distance from the Kinect for Windows sensor.
Note: Angle of Kinect vision 57.5 degrees; Value ranges from approximately–2.2m to +2.2m.
Skeleton2_FootRight_Y
[Real] Contains the value for Y position of the specified joint on the specified skeleton. This is the vertical distance from the Kinect for Winows sensor.
Note: Angle of Kinect vision 43.5 degrees; Value ranges from approximately–1.6m to +1.6m.
Skeleton2_FootRight_Z
[Real] Contains the value for Z position of the specified joint on the specified skeleton. This is the distance from the Kinect for Windows sensor to the joint.
Note: Value ranges from 0 to 4.0m; Practical limits ranges from 1.2m to 3.5m.
Skeleton2_FootRight_TrackingState
[Enum] Current tracking status for the specified joint on the specified skeleton.
- “Not Tracked”:The joint position is not currently being tracked by the Kinect for Windows Sensor
- “Inferred”:The joint position is not currently being tracked, but is being calculated from surrounding joints
- “Tracked”:The joint position is currently being tracked by the Kinect for Windows Sensor
Revisions
V6.0.0
- Initial
V6.0.1
- Fixed: MXM Commands may sometimes hang Manager/Showmaster while the command being executed.
V6.0.2
- Modified: Internal changes.
V 6.7.0
- Improved: Support for High DPI displays (require Manager 6.7.0+ or Showmaster Editor 2.7.0+)
- Changed: Compatibility for Manager 6.7.0 and Showmaster Editor 2.7.0